Omnidirectional Mobile Robot
Using Pandas, Numpy, and Sklearn to create a machine learning model that would predict whether or not a player is a starter.
Project Objective
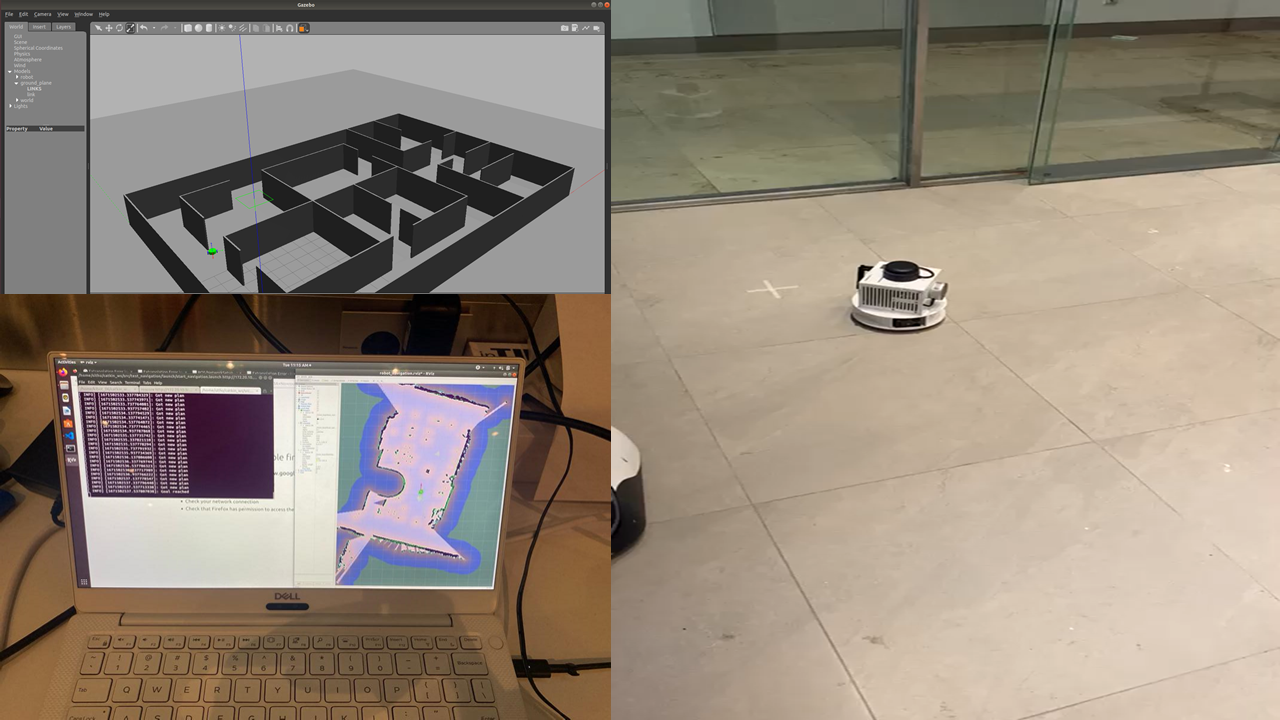
The objective of the Omni Mobile Robot project is to design and build a mobile robot that can move in any direction without changing its orientation. This means that the robot should be able to move forward, backward, left, right, and diagonally without having to turn around. The robot should be equipped with multiple wheels or omni wheels, which are wheels with multiple small rollers that allow the robot to move in any direction without changing its orientation. The robot should also be able to sense its environment and avoid obstacles, navigate autonomously, and perform various tasks such as carrying objects, manipulating tools, or interacting with humans. The Omni Mobile Robot project has many potential applications in areas such as manufacturing, logistics, healthcare, and home automation. For example, the robot could be used in a factory to transport materials and products, in a hospital to deliver medication or assist with patient care, or in a smart home to perform tasks such as cleaning, cooking, or entertainment.
Project Outcome
Soon will be updated.
Soon will be updated.
Soon will be updated
What I learned
Soon will be updated